



快速装盒机传动装置图原理
国内高速装盒机与国外相比,速度上相差甚远。其主要原因在于装盒机的关键部件“取盒机构”,缺乏最合理的设计理论和机构参数,从而严重地影响高速装盒机整体效率的提升。
本文通过介绍一种高速连续式取盒机构的运动轨迹,为高速装盒机的设计提供理论依据。
一、取盒动作简介
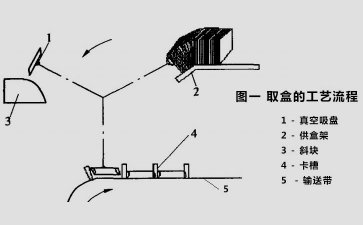
取盒的过程如图1所示,通过真空吸盘将处在供盒架上的药盒从架子上抽出,然后在运动过程中又将纸盒稍微地撑开,最后放到生产线上以供后面装药品使用。具体过程如下:
-
吸盒:旋转的吸盘逆时针转到供盒架处(和水平面夹角30。),真空吸盘开始吸住纸盒的一侧,并将纸盒从供架盒上拉出来。
-
撑盒:当吸盘带着纸盒转到150°时,纸盒的侧棱碰到斜块,顺势滑下让纸盒处于半撑开状。
-
放盒:当纸盒转到输送带的正上方,真空吸盘通气,将纸盒放到运输带的卡槽中,运动中卡槽的一侧将纸盒向前挤压,使纸盒处于完全撑开状,供后面装入药品使用。
二、取盒工艺轨迹的设计
吸盒、撑盒、放盒的三个动作作用点均匀分布,其最重要的动作在于吸盒处。当吸盘在上升的过程中吸住纸盒,到达顶点后又把纸盒往下拉,使纸盒脱离供盒架。
另外从动作过程分析得到,在吸盘旋转一周的过程中只要在关键三个点上满足速度和角度的要求,就可以满足整个取盒动作要求,其他点上的动作可以随意地根据实际情况去设计,其动作不影响整个取盒动作。
高速装盒机取盒机构的运动轨迹必须是连续的,而且为了增加机构的稳定性,整个运动轨迹也要紧凑。
根据实际情况,在满足动作要求下可以将动作轨迹设计成圆形、等边三角形、摆线如图 2所示。现对几种运动轨迹进行比较。

(1)圆形轨迹 如图 2a所示,吸头的轨迹为圆形,可以保证吸头运动速度和加速度的连续性,机构的稳定性好。但是考虑到工艺要求,如图1所示,取盒时纸盒被吸的表面和吸头成 90°,随着吸头的运动,吸头给纸盒一个沿圆切线方向向上的力,因为供盒架的上表面还有支撑 (图 1中略去),对纸盒的上表面进行限制,所以吸头不能很好地将纸盒拉出。
(2)等边三角形轨迹 如图 2b所示,等边三角形轨迹的三个关键点非常明显,而且整个过程轨迹也很紧凑,也能将纸盒顺利的拉出而不受供盒架的限制,但是吸盒前后轨迹的夹角是60°,不能进行调节,而吸盒前后的角度会影响到吸盒的时间,从而直接影响到吸盒的质量。
(3)内摆线轨迹 如图 2c所示吸头的轨迹为内摆线轨迹,吸头取盒时将纸盒向下拉,不受供盒架的位置限制,整个结构非常紧凑,更重要的是吸盒前后的角度是可以通过调节圆弧的半径进行改变,从而确定影响取盒质量的关键参数。
综上所述,从工艺要求和取盒质量等方面考虑,内摆线轨迹综合了圆形轨迹和等边三角形轨迹的优点,所以内摆线的轨迹最优。
三、机构的组成及原理
实现摆线轨迹的机构如图 3所示 ,大转盘旋转,连轴齿轮和转盘齿轮分别绕着固定齿轮 I和固定齿轮Ⅱ旋转。小转盘在随着大转盘公转的同时,转盘齿轮控制它也进行自转,同理,连轴齿轮控制着主动齿轮公转的同时也进行自转,带动从动齿轮转动,真空吸头和从动齿轮固连,所以吸头进行公转的同时也进行着自转。所以只要控制齿轮之间的传动比,就可以控制真空吸头在指定的位置实现指定的动作。

四、关键参数的确定
对该机构的运动过程进行建模,如图 4所示。
以大转盘的中心为坐标原点建立坐标,取小转盘的中心与坐标原点成θ0=30°,此时的位置即为吸盒的位置,建立小转盘的动坐标 x'y',再建立从动齿轮的动坐标 x"y",两个坐标的原点重合在主动齿轮的中心。根据动作要求进行设计,当大转盘逆时针转过一个(θ-θ0)角度时,吸头也逆时针转过一个(θ-θ0)角度,小转盘顺时针旋转,为满足动作要求,小转盘须相对大转盘顺时针旋转 2(θ-θ0),才能满足吸头在转过120°后,吸头、从动齿轮、主动齿轮成为一条直线,形成方盒动作。所以相对固定坐标,小转盘顺时针旋转了3(θ-θ0)。把从动齿轮的坐标转化到固定坐标中得:

当θ0=30°时,化简得到从动齿轮的运动方程为:

从运动方程中可以得出,从动齿轮中心的运动轨迹是关于θ的函数,轨迹的大小形状由参数r和r1来确定。
用Solidworks软件对机构进行建模,在用Solidworks Motion插件去模拟运动分析,得到从动齿轮的运动轨迹为摆线,如图5所示,符合动作要求。

按照设计要求,该取盒机构的转速为 60r/min,即旋转角度θ=ωt=2πt,装上 3个吸头 ,取盒速率为 180~/min。对运动方程进行二次求导得到该从动齿轮在运动一周内的加速度为a=√(xn2+yn2),化简得 a=4π2√(r2+16r2+8rr1cos30),当cos3θ的值为 1时 ,即在 0=0°、120°、240°(此处角度 以与轴成 30。开始算起)位置时,加速度的值最大,也刚好是三个关键点,此时最大加速度为 a=4π2(r +4r1)。从动齿轮的运动方程为连续的三角函数,其加速度也为连续函数,即该机构能平稳的运行,在角速度确定的情况下,加速度只与 r与 r1有关 ,所以只需调整其大小就可以控制最大加速度的大小,另外在 r和 r不变的情况下,也可以适当的调整吸头杆的长度,同样可以控制加速度的大小 。
下一篇:如何划分自动装盒机的种类